Research
Our research interests include but are not limited to:
🖐️ Tactile Sensing and Multimodal Perception.
We design novel tactile sensors and multimodal sensing systems (e.g., vision-tactile fusion) to equip robotic hands with human-like touch capabilities. Research spans sensor hardware development, signal processing algorithms, and applications in deformable object manipulation.
🧠 Embodied Intelligence and Skill Learning.
We explore reinforcement learning, imitation learning, and tactile-guided policy optimization to enable robots to adaptively grasp, manipulate, and collaborate with humans in unstructured environments.
🤖 Robotic Systems and Advanced End-effector Design.
From soft robotics to dexterous manipulators, we build integrated robotic systems with an emphasis on real-world applicability. Projects include dynamic control architectures, sensorimotor coordination, and hardware-software co-design for robust robotic operations.
🌐 Human-robot Interaction.
We investigate teleoperation interfaces, shared autonomy frameworks, and intuitive communication protocols to bridge human intent with robotic execution. Applications range from industrial cobots to assistive robotics for healthcare scenarios.
Equipments
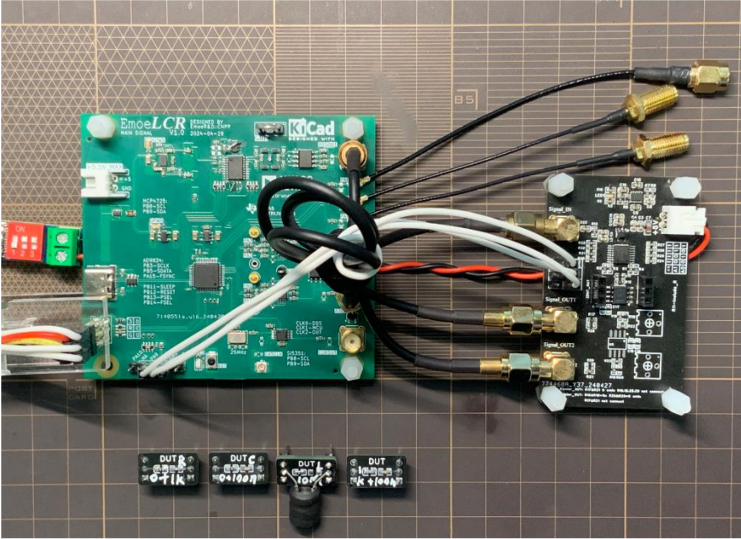
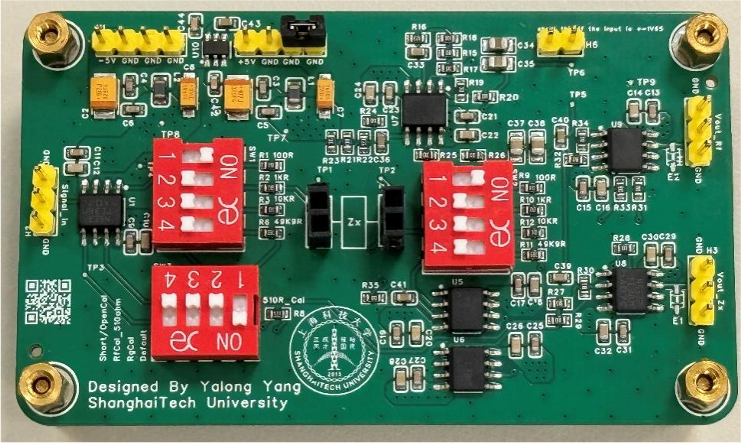
🛠️ Hardware Infrastructure
- We have various robots, VR equipments, sensors, fabrication devices, etc.

-
Computational Power:
-
Students have 4090 desktops, 4 x Nvidia A40 server.
-
Besides, SIST have clusters for large-scale training.
-
Teaching